During the month of October, the PLIX team is partnering with @aaffinito (New York Public Library) and @Dave (Michigan City Library, Indiana) to co-create a new activity based on the research of Kyung Yun Choi, a Ph.D. student at the Media Lab. Yun’s research focuses on the development of new types of soft robotic systems, and in particular ones that use air (or inflation) for movement. We’ll be engaging with these ideas by creating our own inflatable soft robots using recycled materials (like chip bags and food packaging)!
In this thread, we’ll be sharing reflections as we develop the new PLIX Inflatables activity, design learning prompts, create a new zine, and more, as a form of open documentation of the co-design process. We hope that you’ll share new ideas, ask questions, and leave comments and feedback along the way!
Reporting out for week one of the co-design experience!
For our first reflection, @aaffinito had the idea of sharing what we found most surprising about the project as we began tinkering with the Inflatables materials! Personally, I was surprised by the range of different motions and shapes that could be created using just a mini iron and some leftover food packaging! Process-wise, I began by creating folds using a 1) diamond shape 2) a hexagon and finally 3) mountain folds (see below, respectively).
Starting out, it can be difficult to predict what will result from your folds and creases – as you create more examples, though, you start to understand how your design will inflate! Even with some experience, it can still be unpredictable : ) (More practice is needed!) Thinking about this programming in the library context, I am wondering what examples a librarian could prepare before running this activity that would help patrons intuit what types of folds and creases they would need to make for their project. We might envision a set of 3 - 5 example inflatables that show off what’s possible with these materials.
Moving forward, I’m curious about exploring different shapes or behaviors (like twisting and curling). Would love some ideas as to what to create next!
I don’t know what’s possible with inflatables but love the idea of creating functional pieces with inflatables… Inflatable tablet or book stand, or inflatable/collapsible pillow… but I guess those aren’t really robots. Sounds like a really great way for creative reuse!
Hiya PLIX People!
I had such a fun time working through these materials and seeing how Yun’s projects translated when being attempted by folks new to the process.
What I was most surprised by was the amount of precision needed to make a shape that successfully bends the way you want. For example, it took me way more time to figure out a proper diamond placement for a shape that folds upwards (see below) even though that’s the first shape that’s suggested in her documentation.
I ended up having more success with an origami-inspired ‘kissy bot’ (also below), maybe because that didn’t really require heat-imprinting any shapes, just sealing the sides and folding. Echoing Avery, it can be unpredictable, but I think with the right framing that can be part of the fun!
Thinking about this in the context of a library I’m thinking it will be really helpful to have visual aides, whether that’s projects or step-by-step drawing, just to avoid newcomers getting frustrated with the learning curve it takes to create a project. Starting with something even simpler like just a shape (like Avery’s ghost) and then moving on to bends/moving shapes seems like the way to go.
Moving forward I would love to really master some of the folds I was struggling with (like the mountain fold that is intended to have a really cool curling effect but I never quite got it) and start thinking not just about the shapes but how they might fit into a broader programming theme.
Have a great long weekend and looking forward to seeing feedback/ideas as we move into Week 2!
-Allie
Hey, Brian! Yun, the MIT researcher we’re working with, has actually been exploring using inflatables to “potentiate” other objects; I think she created an example book light that does just what you’ve described. You’re spot-on! Would be cool to think about how we could build that idea into an activity prompt.
Week One Co-Design
Hi everyone! I finally had a chance this weekend to play with the mini iron and Yun’s diamond template. For me, the mini iron is a much better tool for this type of project compared to a soldering iron. The soldering iron seems to require more time for sealing the edges and folds compared to the iron. While I’m still having issues with my seals coming undone with the iron, the seals seem to hold better/longer than what I was able to achieve with a soldering iron.
Yun’s presentation blew my mind as I witnessed the incredible possibilities for motion and movement in soft robotics with bags of chips!! I will admit that I felt overwhelmed at first, especially when attempting my first creation. As Allie mentioned in her post, I too find that great attention to detail is required to get the inflated bag to fold the way you want.
So this sit-ups-guy prototype is what I produced in my tinker session earlier today:
I hope to make version 2 with a Dorito head. I might also consider an alternative placement for the straw…
I decided to stay simple and try to master a basic fold using Yun’s paper diamond template. I made a cardboard template with the paper one so that I could easily trace the diamond shape on the bag. My goal was to create with the exact dimensions of Yun’s scalable template. I was hoping the sharpie would bleed through the paper onto the cardboard underneath while I traced the template. But that didn’t happen. So I used a blade from the scissors as an xacto knife, tracing the shape of the template into the cardboard.
I am super excited to learn and explore more movements! My goal over the next few weeks is to find a way to combine different movements into a single creation.
Supplies at the start and finish of today’s tinker session:
Hi @aaffinito!
I LOVE your “kissy-bot” creation!! This design would be a great intro project for library patrons. I know I quickly get confused when it comes to origami folding patterns. Detailed visual aides in step-by-step fashion for folding patterns greatly help me make sense of the world! And especially in our current age of remote and digital library programming, a step-by-step video would be perfect for an origami-inspired project like this one.
Hi @averymsnormandin!
Some ideas of what to make next:
–The twisting model could be used to make a jack-in-the-box or a jack-o-lantern-in-the-box (Please post a pic here of your ghost creation! I love that thing!!)
–The curling party-favor model could be used as a frog’s tongue.
–Sticking with the halloween theme, a bat with flapping wings would be nice, too!
–A cardboard mermaid with a tail that moves up and down?
I wanted to see if Yun’s diamond-pattern flex design could be accomplished heat-lessly with familiar tools like a stapler and tape. I call this a success, and I was surprised how quickly it worked out for me! My bends are not quite so dramatic as Dave’s, but I am happy with the results.
Here’s how I made it:
Using a bag that is still closed on one end, I stapled the diamond shape in the center of the bag. I taped over the staples, on BOTH sides of the bag, to seal off the holes. I stuck a straw in the open end. I rolled the open end of the bag closed around the straw. I stapled through the rolled layers to keep the closed end in place. Finally, I added a lot of tape over the folded edge and any staple holes.
My second attempt was not so successful. The plastic did not have a “memory” of its original form to spring back to.
I am really interested in the existing “natural” seals of the bags I use. I like this shape but I couldn’t figure out an interesting use/narrative for it. From an almond bag from TJ’s.
I got a couple of tiers into this mylar cracker bag liner.
One other thing I tried was to make a party tooter. There are so many instructions about this by crafty parents who host parties. You need to let the crease cure for hours so the activity isn’t good for a library program. Also, the spring degrades over time, so that the curl is less and less tight with each blow. See my results with a taped seal. It could be that I should have used a different paper. Mine was a kind of art/butcher paper.
I did have another ~6 unsuccessful attempts but they didn’t have much to add to the conversation.
Hello Plix People!
This week our forum challenge was to create a wearable inflatable, and I chose my inspiration from Pee-Wee Herman/Doctor Who, because bow-ties are cool
Some design notes:
-The bow-tie is one piece, with two basic diamond shapes imprinted on each side, so that when inflated the two bow-tie sides bend upward.
I used Yun’s method of making a newspaper pattern, sandwiching it between the mylar sheets, and then just ironing the whole thing with a standard iron. I liked this method for a couple reasons. First, I had to really think out and plan my design, instead of just jumping right in, and that made my attempts more successful. Also I feel like kids could make their own templates and have that agency, but then an adult can help with the hot iron. It even made a funny noise when the paper vibrates between the layers, added bonus!
-My first attempt I went a little too hot with the iron, and accidentally sealed everything except the middle, here were those results. It gave more of a butterfly vibe than a bow-tie.
Some Reflections
-A really fun part of this process was customizing my bow-tie and decorating it by drawing on the outside, like @Dave 's Dorito man, I think a big draw of this in programming will be opportunities for kids to make their projects uniquely theirs.
-I like experimenting with different straw sizes and straw connections. I achieved this sort of segmented straw section that hooks up to my mouth by cutting straws at an angle and connecting them with tape. Could be a good work around if folks don’t have access to rubber tubing.
Going forward we’re starting to think about zine things and big themes, would love to hear feedback about what stands out to you about this project!
Yesterday I tinkered with mountain folds and I am still not sure if I am making them the right way. My exploration of the mountain folds led to the creation of this Hungry-Hungry Chippo:
I hope to be able to somehow add the curly, party blower to this Hungry-Hungry Chippo as a frog-like tongue.
I also messed around with making wings for a bat or dragon. These wings could be used as a wearable with the right design. I’m still messin’ around with it:
I put together a short bibliography on the topics of pneumatics, origami, and soft robotics using the Science Reference Center database. My library subscribes to this EBSCO database and promotes it with other databases through our library website on the “Teen Homework Resources” webpage. I found four articles in the database to be relevant to the PLIX inflatables co-design project. I also discovered four additional resources of relevance via a quick Google search. Databases like the Science Reference Center and Gale Virtual Reference Library will likely produce more informative, current, and relevant search results on the topic of soft robotics than the physical nonfiction collections of the children’s departments in many public libraries.
Please feel free to add resources to this short bibliography I’ve assembled!
And please check out and download the PDF articles, bibliography, and this bibliography article highlights post at https://drive.google.com/drive/folders/1T7mq10U-gFhq3ImlybPotQtuUJIl_kyY?usp=sharing
Article Highlights: Pneumatics, Origami, and Soft Robotics
Bio-inspired Soft Robotics: Material selection, actuation, and design
“Soft robots have distributed deformations over their soft components allowing for theoretically infinite degrees of freedom [7]. Thus, where rigid robots utilize a motor for every joint, soft robotic actuation is integrated throughout the entirety of the structure. There are several different control methods for soft robotic actuation that utilize these material properties. This includes pneumatics [20–22], electrical actuation [23,24], and chemical stimulation [25,26]. Generally, the actuation of conventional robots is more precise, but soft robotic actuation is more flexible. In this section, we will cover key working principles of soft robotic actuation” (Coyle et al, 2018).
“For soft robotic systems, engineers can take inspirations from nature and integrate many of their design principles into a holistic system.
Much inspiration for soft robotic design comes from the actuation behavior of entirely soft bodied organisms such as earthworms, jellyfish, and octopi. There are plenty of practical engineering designs that can be learned from the octopus’s arm due to being a muscular hydrostat [65]. Much like PAM’s, the octopus’s arm is capable of motion with nearly infinite degrees of freedom. Due to their unique muscular pairing of four groups of the longitudinal (running down the length of the arm) and the radial muscles (perpendicular to the arm axis) (Fig. 4), antagonistic forces enable the octopus arms to elongate, shorten, twist or bend [65,82]. Such organic internal architectures help inform the modeling and design considerations of robots with similar continuum structures [65,66,83]” (Coyle et al, 2018).
“No longer limited to traditional birds and boats, origami–the art of paper folding–is evolving artistically and technologically, thanks to a small but growing number of mathematicians and scientists around the world, including Robert Lang. What’s more, this group believes the ancient art holds elegant solutions to problems in fields as diverse as automobile safety, space science, architecture, robotics, manufacturing, and medicine” (Jensen, 2007).
“A laser physicist and former researcher with NASA’s Jet Propulsion Laboratory, Lang, 46, is a pioneer in technical and computational origami, which focuses on the mathematics behind the art. In the early '90s, Lang and Japanese origami master Toshiyuki Meguro simultaneously hit on a technique that has revolutionized folding. Now called “circle-river packing,” the technique allowed origamists to do something that had always eluded them–create models with realistic appendages in specific spots” (Jensen, 2007).
“During the 1990s Lang also developed a computer program that uses circle-river packing to produce sophisticated designs. Called TreeMaker, the program allows artists to draw a stick figure of a desired model on-screen. The software then calculates and prints out the most efficient crease pattern. A second program, called ReferenceFinder, determines the sequence or folds needed to create the model” (Jensen, 2007).
“Robert Lang: ‘I worked a lot on insects, and in working out those design techniques, I developed techniques that could be used for many subjects’ “ (Jensen, 2007).
(Keywords: Origami, Biomimicry, Mathematics in Art, Art & Technology)
Abstract:
Soft, pneumatic actuators that buckle when interior pressure is less than exterior provide a new mechanism of actuation. Upon application of negative pneumatic pressure, elastic beam elements in these actuators undergo reversible, cooperative collapse, and generate a rotational motion. These actuators are inexpensive to fabricate, lightweight, easy to control, and safe to operate. They can be used in devices that manipulate objects, locomote, or interact cooperatively with humans.
(Keywords: Pneumatic Actuation, Actuators, Soft Robotics)
Heat-to-fold Robots
These robots are made of the same plastic found in shrinky dinks: polystyrene.
“A new crawling robot has taken a page from origami design” (Rosen, 2014).
“The paper-and-plastic machine can spring from flat to folded just like a pop-up book” (Rosen, 2014).
“By embedding heating elements in the robot’s hinges, Harvard engineer Sam Felton and colleagues created a device that can alter shape on its own, using preprogrammed temperature changes” (Rosen, 2014).
“Self-folding devices like the robot could save room on spacecraft, or even transform into portable shelters for people living in dangerous places (Rosen, 2014).
(Keywords: Robot Design & Construction, Origami)
“A new type of shape-shifting robot can undergo complete metamorphosis in a matter of minutes. The bot is composed of a simple metal cube that wraps itself in various high-tech origami sheets that fold into wings, wheels and other appendages for getting around. By donning and doffing different origami exoskeletons, the metal core can quickly switch from a walking to rolling to sail- ing bot and back again” (Temming, 2017).
“Such adaptable robots may be used for incision-free surgery, says Antoine Cully, a roboticist at Imperial College London who was not involved in the study. A patient could ingest a magnetic core and various exoskeletons, which a surgeon would then remotely control from outside the body” (Temming, 2017).
(Keywords: Robots, Origami)
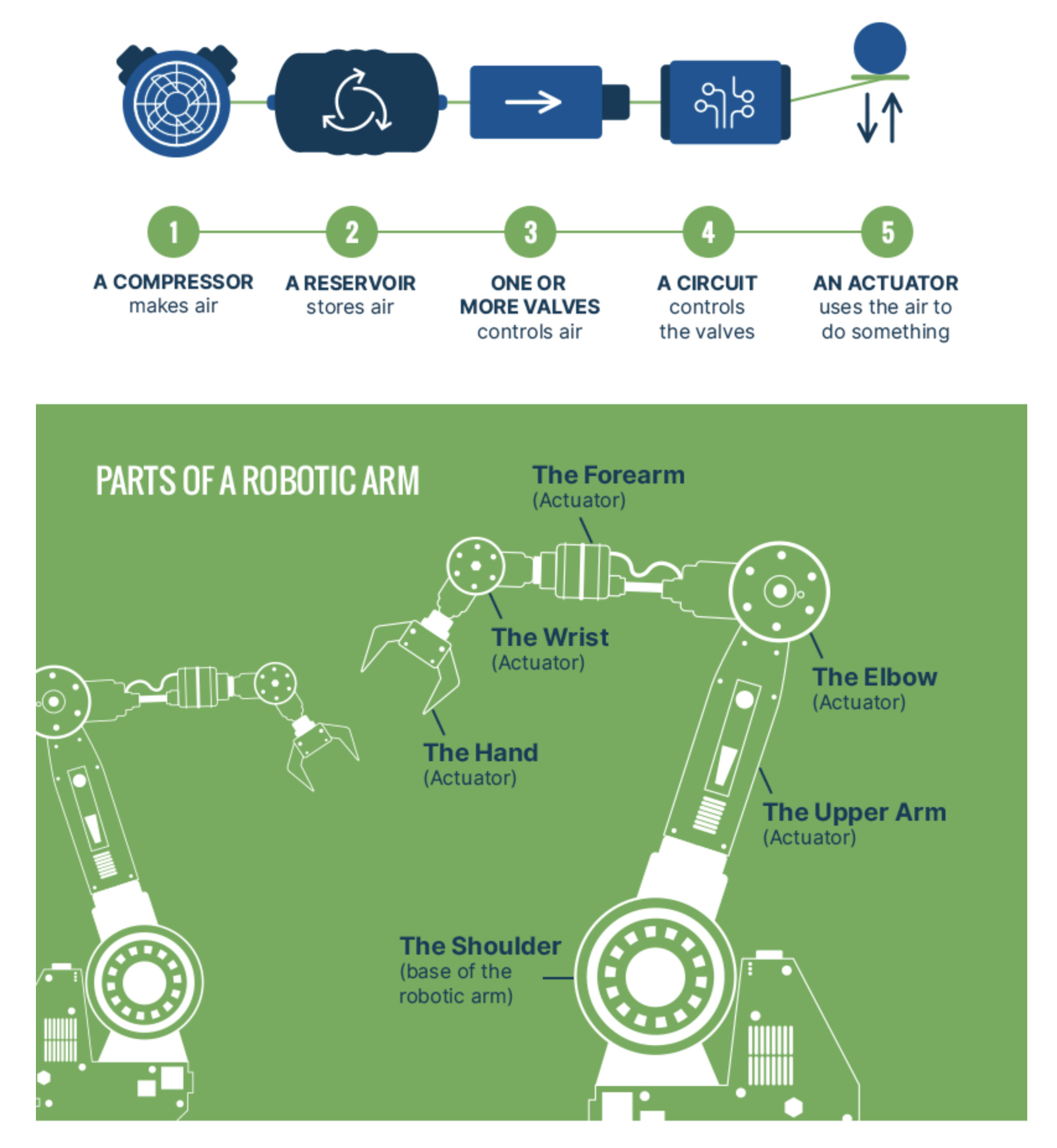
Hydraulics and Pneumatics — what’s the difference, and why the confusion?
“The difference between pneumatics and hydraulics actually lies in the medium that is utilised to transmit power. Pneumatics use easily-compressible gas like air or pure gas. Meanwhile, hydraulics utilize relatively-incompressible liquid media like mineral oil, ethylene glycol, water, synthetic types, or high temperature fire-resistant fluids to make power transmission possible” (Worlifts Ltd, 2017).
“Industrial robots use rigid skeletons in imitation of human shoulder-arm-wrist linkages, so their movement can be described with simple geometric relations—for example, a linkage rotating through space about a fixed point creates a perfect circle. In contrast, soft robot arms, like octopus tentacles, are meant to stretch and squish at every point along their length. No clean geometric relations exist here” (Mengüç, 2019).
“Ultimately, the ambitious dream of soft roboticists is to bring robots out of ‘rigid’ environments and tasks, and into the big, messy world in which humans live and work” (Mengüç, 2019).
“Soft robots promise to fundamentally change the ways in which many areas of technology are implemented, but the most immediate effects will be seen in aquatic, industrial, and medical robots. Aquatic robotics includes inexpensive robots for exploration, maritime robots for inspection and welding, and stealthy naval surveillance robots. Soft industrial robot arms and hands will solve issues in warehouse logistics by making object handling feasible for robots operating alongside human coworkers. Medical applications include certain surgical tools (specifically endoscopes), and prosthetics or orthotics” (Mengüç, 2019).
Bibliography
Coyle, S., Majidi, C., LeDuc, P., & Hsia, K. J. (2018, July 1). Bio-inspired Soft Robotics: Material Selection, Actuation, and Design. Extreme Mechanics Letters . Elsevier Ltd. https://doi.org/10.1016/j.eml.2018.05.003
Jensen, B. (2007). Into the Fold. Smithsonian , 38(3), 74.
Mengüç, Y. (2019, July 22). Smart and Squishy Robots. Retrieved October 24, 2020, from
https:/www.americanscientist.org/article/smart-and-squishy-robots
Hello, all! Adding a quick reflection about how collaboration online has worked for us thus far!
Prior to starting the co-design, I was a bit nervous as to how effectively we could collaborate together remotely, in particular for an activity that is so hands-on and making-focused. Because the co-design team is distributed across the US (Massachusetts; New York; California; Indiana), we sent out core play-testing materials so that we could begin tinkering with a similar set of tools! Every week, we have an ‘open playtest’ time, where we all join a Zoom call and make together in a looser and less-formal environment than our weekly ‘business’ meeting ; ) This format has worked excellently, as it serves as a time to not only explore prompts, but also get to know everyone better in the process of creation : ) We also always play music! (Shout out to the PLIX Inflatables playlist, by the way.) During these sessions, we experiment with creating new types of folds and designs, explore use of different tools or materials, and brainstorm workshop prompts. Having everyone on the same call is extremely useful for troubleshooting and co-creating solutions as we iron out the activity design.
We’ve also started working on the Inflatables zine! @caratarmey created a template, and our amazing librarian collaborators used the annotate teacher to draw in new ideas and comments. This is probably one of my favorite modes of remote collaborative collaboration!
Just checking in to post my results from this week’s prompt: Create a spooky pop-up
I went with a kind of ghost/puppet hybrid using an extended version of the kissy bot from Week 1.
Trick for folding the mylar is to re-enforce the folds not with heat but with a straight-edge. I used the end of a fork and it worked really well!
I didn’t use the ‘natural seams’ of the bag, because the extra overlap on the sides makes it harder to do the inward folds used. Instead, I created a tube from one cut-out sheet of mylar, put the heat seam at the middle, and squished it down flat. I didn’t take a picture, I know that’s hard to imagine and not sure I’m explaining it well…
Once I had made the folds really clear, I kinda just squished it together and it worked. I’m sure you could do something that might end up a little prettier, but its also good to know that you don’t have to be an origami expert to get the results above
Looking forward to seeing how this might work with a puppet-type prompt, maybe with a storytelling tie in!
I was inspired by some of the PLIX Paper circuits examples, where the circuity is hidden underneath the paper. Similarly, I wanted to hide the “mechanics” of this particular inflatable! I can imagine making a whole network of inflatables linked by a single air system (a straw or tubing or otherwise), and creating something like a pop-up garden! Alternatively, thinking of building in this style, you could also create a mask of some actuating mask – perfect for Halloween!