I put together a short bibliography on the topics of pneumatics, origami, and soft robotics using the Science Reference Center database. My library subscribes to this EBSCO database and promotes it with other databases through our library website on the “Teen Homework Resources” webpage. I found four articles in the database to be relevant to the PLIX inflatables co-design project. I also discovered four additional resources of relevance via a quick Google search. Databases like the Science Reference Center and Gale Virtual Reference Library will likely produce more informative, current, and relevant search results on the topic of soft robotics than the physical nonfiction collections of the children’s departments in many public libraries.
Please feel free to add resources to this short bibliography I’ve assembled!
And please check out and download the PDF articles, bibliography, and this bibliography article highlights post at
https://drive.google.com/drive/folders/1T7mq10U-gFhq3ImlybPotQtuUJIl_kyY?usp=sharing
Article Highlights: Pneumatics, Origami, and Soft Robotics
Bio-inspired Soft Robotics: Material selection, actuation, and design
“Soft robots have distributed deformations over their soft components allowing for theoretically infinite degrees of freedom [7]. Thus, where rigid robots utilize a motor for every joint, soft robotic actuation is integrated throughout the entirety of the structure. There are several different control methods for soft robotic actuation that utilize these material properties. This includes pneumatics [20–22], electrical actuation [23,24], and chemical stimulation [25,26]. Generally, the actuation of conventional robots is more precise, but soft robotic actuation is more flexible. In this section, we will cover key working principles of soft robotic actuation” (Coyle et al, 2018).
“For soft robotic systems, engineers can take inspirations from nature and integrate many of their design principles into a holistic system.
Much inspiration for soft robotic design comes from the actuation behavior of entirely soft bodied organisms such as earthworms, jellyfish, and octopi. There are plenty of practical engineering designs that can be learned from the octopus’s arm due to being a muscular hydrostat [65]. Much like PAM’s, the octopus’s arm is capable of motion with nearly infinite degrees of freedom. Due to their unique muscular pairing of four groups of the longitudinal (running down the length of the arm) and the radial muscles (perpendicular to the arm axis) (Fig. 4), antagonistic forces enable the octopus arms to elongate, shorten, twist or bend [65,82]. Such organic internal architectures help inform the modeling and design considerations of robots with similar continuum structures [65,66,83]” (Coyle et al, 2018).
(Keywords: Soft Robotics, Biomimicry, Biomimetic, Pneumatics, Actuation, Infinite Degrees of Freedom, Morphology, Pneumatic Artificial Muscle (PAM))
Into the Fold
“No longer limited to traditional birds and boats, origami–the art of paper folding–is evolving artistically and technologically, thanks to a small but growing number of mathematicians and scientists around the world, including Robert Lang. What’s more, this group believes the ancient art holds elegant solutions to problems in fields as diverse as automobile safety, space science, architecture, robotics, manufacturing, and medicine” (Jensen, 2007).
“A laser physicist and former researcher with NASA’s Jet Propulsion Laboratory, Lang, 46, is a pioneer in technical and computational origami, which focuses on the mathematics behind the art. In the early '90s, Lang and Japanese origami master Toshiyuki Meguro simultaneously hit on a technique that has revolutionized folding. Now called “circle-river packing,” the technique allowed origamists to do something that had always eluded them–create models with realistic appendages in specific spots” (Jensen, 2007).
“During the 1990s Lang also developed a computer program that uses circle-river packing to produce sophisticated designs. Called TreeMaker, the program allows artists to draw a stick figure of a desired model on-screen. The software then calculates and prints out the most efficient crease pattern. A second program, called ReferenceFinder, determines the sequence or folds needed to create the model” (Jensen, 2007).
“Robert Lang: ‘I worked a lot on insects, and in working out those design techniques, I developed techniques that could be used for many subjects’ “ (Jensen, 2007).
(Keywords: Origami, Biomimicry, Mathematics in Art, Art & Technology)
Robert Lang’s Origami Fiddler Crab and Crease Pattern:
https://langorigami.com/artwork/fiddler-crab-opus-446/


Robotics: Robot Moves When Squished
This brief article from Nature is a description of the article by D. Yang, et al’s “Buckling of Elastomeric Beams Enables Actuation of Soft Machines.”

Abstract:
Soft, pneumatic actuators that buckle when interior pressure is less than exterior provide a new mechanism of actuation. Upon application of negative pneumatic pressure, elastic beam elements in these actuators undergo reversible, cooperative collapse, and generate a rotational motion. These actuators are inexpensive to fabricate, lightweight, easy to control, and safe to operate. They can be used in devices that manipulate objects, locomote, or interact cooperatively with humans.
(Keywords: Pneumatic Actuation, Actuators, Soft Robotics)
Heat-to-fold Robots

These robots are made of the same plastic found in shrinky dinks: polystyrene.
“A new crawling robot has taken a page from origami design” (Rosen, 2014).
“The paper-and-plastic machine can spring from flat to folded just like a pop-up book” (Rosen, 2014).
“By embedding heating elements in the robot’s hinges, Harvard engineer Sam Felton and colleagues created a device that can alter shape on its own, using preprogrammed temperature changes” (Rosen, 2014).
“Self-folding devices like the robot could save room on spacecraft, or even transform into portable shelters for people living in dangerous places (Rosen, 2014).
(Keywords: Robot Design & Construction, Origami)

Origami Outfits Help Bots Retool

“A new type of shape-shifting robot can undergo complete metamorphosis in a matter of minutes. The bot is composed of a simple metal cube that wraps itself in various high-tech origami sheets that fold into wings, wheels and other appendages for getting around. By donning and doffing different origami exoskeletons, the metal core can quickly switch from a walking to rolling to sail- ing bot and back again” (Temming, 2017).
“Such adaptable robots may be used for incision-free surgery, says Antoine Cully, a roboticist at Imperial College London who was not involved in the study. A patient could ingest a magnetic core and various exoskeletons, which a surgeon would then remotely control from outside the body” (Temming, 2017).
(Keywords: Robots, Origami)

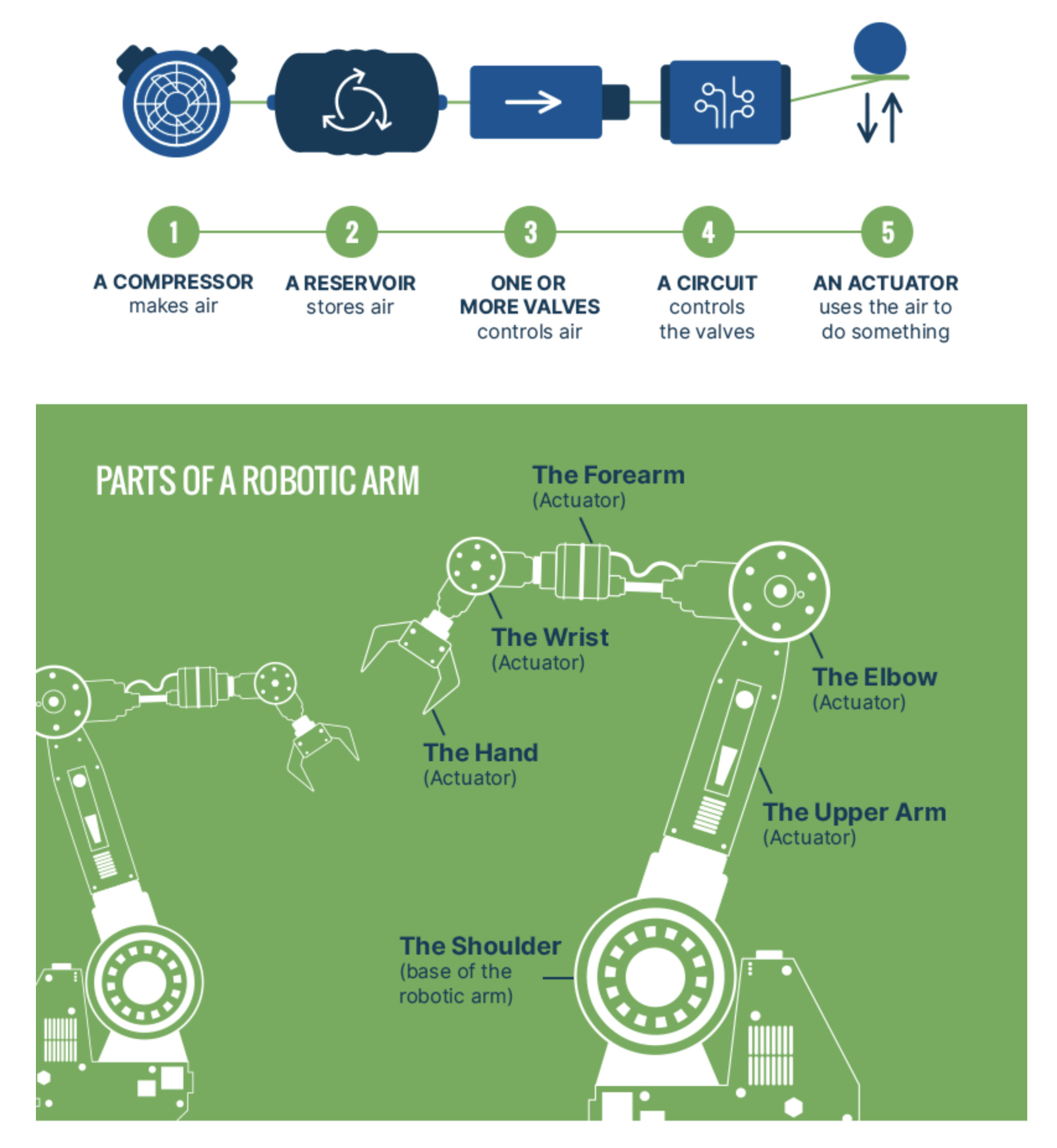
How a Pneumatic Robot Arm Works

Hydraulics and Pneumatics — what’s the difference, and why the confusion?
“The difference between pneumatics and hydraulics actually lies in the medium that is utilised to transmit power. Pneumatics use easily-compressible gas like air or pure gas. Meanwhile, hydraulics utilize relatively-incompressible liquid media like mineral oil, ethylene glycol, water, synthetic types, or high temperature fire-resistant fluids to make power transmission possible” (Worlifts Ltd, 2017).

Smart and Squishy Robots
https://www.americanscientist.org/article/smart-and-squishy-robots
“Industrial robots use rigid skeletons in imitation of human shoulder-arm-wrist linkages, so their movement can be described with simple geometric relations—for example, a linkage rotating through space about a fixed point creates a perfect circle. In contrast, soft robot arms, like octopus tentacles, are meant to stretch and squish at every point along their length. No clean geometric relations exist here” (Mengüç, 2019).
“Ultimately, the ambitious dream of soft roboticists is to bring robots out of ‘rigid’ environments and tasks, and into the big, messy world in which humans live and work” (Mengüç, 2019).
“Soft robots promise to fundamentally change the ways in which many areas of technology are implemented, but the most immediate effects will be seen in aquatic, industrial, and medical robots. Aquatic robotics includes inexpensive robots for exploration, maritime robots for inspection and welding, and stealthy naval surveillance robots. Soft industrial robot arms and hands will solve issues in warehouse logistics by making object handling feasible for robots operating alongside human coworkers. Medical applications include certain surgical tools (specifically endoscopes), and prosthetics or orthotics” (Mengüç, 2019).
Bibliography
Coyle, S., Majidi, C., LeDuc, P., & Hsia, K. J. (2018, July 1). Bio-inspired Soft Robotics: Material Selection, Actuation, and Design. Extreme Mechanics Letters . Elsevier Ltd.
https://doi.org/10.1016/j.eml.2018.05.003
Jensen, B. (2007). Into the Fold. Smithsonian , 38(3), 74.
Mengüç, Y. (2019, July 22). Smart and Squishy Robots. Retrieved October 24, 2020, from
https:/www.americanscientist.org/article/smart-and-squishy-robots
Robotics: Robot Moves When Squished. (2015). Nature , 526(7571), 9. Robot moves when squished | Nature
Rosen, M. (2014). Heat-to-fold Robots. Science News , 186(6), 5.
Temming, M. (2017). Origami Outfits Help Bots Retool. Science News , 192(7), 13.
Quincy Compressor. (2020, February 12). How a Pneumatic Robot Arm Works. Retrieved October 24, 2020, from How A Pneumatic Robot Arm Works - An Infographic | Quincy Compressor
Worlifts Ltd. (2017, January 13). Hydraulics and Pneumatics - what’s the difference, and why the confusion? Retrieved October 24, 2020, from Hydraulics and Pneumatics — what’s the difference, and why the confusion? | by Worlifts Ltd | Medium